型号:LS6-B502/602/702
爱普生 LS6-B SCARA机器人
特性及优势
免电池的马达单元
• 无需更换电池
• 减少宕机时间
J2关节顶端增加以太网接线端口,内置Cat 5e相机网线,方便移动相机安装
第二轴臂斜向出线,外形更紧凑,减少安装空间
通用的I/O接口,更具适用性的控制器
像RC700-A控制器一样,RC90-B控制器支持NPN / PNP两种接线方式。
采用简单可拆卸结构的M/C电缆
• 拆卸无需使用工具,实现轻松卸载
• 易于在设备内部安装和更换机器人

| 产品名称 | LS6-B | |||
|---|---|---|---|---|
| 产品型号 | LS6-B502* | LS6-B602* | LS6-B702* | |
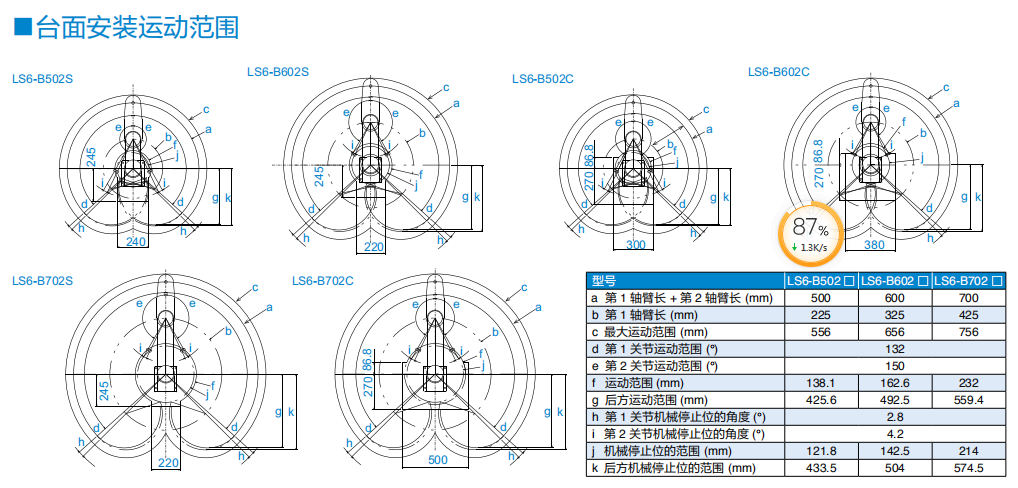
| 安装方式 | 台面安装 | |||
| 臂长 | 第1-2轴臂 | 500 mm | 600 mm | 700 mm |
| 最大运动速度 | 第1-2关节 | 7120 mm/s | 7850 mm/s | 8590 mm/s |
| 第3关节 | 1100 mm/s | |||
| 第4关节 | 2000 °/s | |||
| 本体重量(不含电缆) | 17 kg | 17 kg | 18 kg | |
| 重复定位精度 | 第1-2关节 | ±0.02 mm | ||
| 第3关节 | ±0.01 mm | |||
| 第4关节 | ±0.01° | |||
| 最大运动范围 | 第1关节 | ±132° | ||
| 第2关节 | ±150° | |||
| 第3关节 (洁净型) | 200 mm (170 mm) | |||
| 第4关节 | ±360° | |||
| 负载*1 | 额定值 | 2 kg | ||
| 最大值 | 6 kg | |||
| 标准循环时间*2 | 0.39 秒 | 0.40 秒 | 0.42 秒 | |
| 第4关节容许惯性力矩*3 | 额定值 | 0.01 kg·㎡ | ||
| 最大值 | 0.12 kg·㎡ | |||
| 电机功耗 | 第1关节 | 200 W | ||
| 第2关节 | 200 W | |||
| 第3关节 | 100 W | |||
| 第4关节 | 100 W | |||
| 第3关节顶压力 | 100 N | |||
| 原点复位 | 无需原点复位 | |||
| 用户电路 | 15针(D-SUB接口)、RJ45 8针(CAT 5e) | |||
| 用户气路 | ø4mm×1, ø6mm×2 耐压:0.59 MPa(6 kgf/cm2 )(86 psi) | |||
| 安装环境 | 标准型/洁净型*4 | |||
| 适用控制器 | RC90-B | |||
| 安全标准 | CE,KC,ANSI/RIA R15.06-2012,NFPA 79 (2007 Edication) | |||
*1:不要超过规定的最大负载使用。
*2:负载2 kg下,(水平300mm、垂直25mm)往返拱形运动的循环时间(最大速度最优路径坐标)。
*3:负载重心与第4关节中心位置一致;如果不一致,通过INERTIA命令来设置参数。
*4:符合 ISO 4 级洁净度标准。








